Le projet VIRTFac intègre un module complet permettant en temps réel d’observer, d’analyser et de simuler différents scénarios. Son but est d’améliorer la praticité et l’ergonomie des différents postes de travail, ainsi que d'améliorer la qualité des gestes des opérateurs. Notre volonté avec ce module nommé « Ergonom.io », est de construire un outil complet qui puisse accompagner de A à Z l’ergonome dans la création ou l’amélioration d'une ligne de production ou d’un poste de travail. Ergonom.io se base sur un projet interne du laboratoire l’ICUBE qui a vu le jour en 2018 et qui portait alors le nom de « VIRWORKS ». Cette boîte à outils de l’ergonome s'appuie sur des simulations ergonomiques de type « travailleur virtuel », avec des interactions en temps réel permettant de modifier directement les différents paramètres du système tel que le positionnement ou la hauteur du poste de travail et de ses composants, l'éclairage, la hauteur de siège etc. Ergonom.io est axé sur trois objectifs principaux : • Étudier et améliorer l'ergonomie du poste de travail et des gestes de l'opérateur • Éviter les Troubles Musculo Squelettiques (TMS) • Améliorer la productivité
Nos expérimentations liées aux développements ont été réalisées dans l’usine école de l'IUT de Haguenau. Ainsi, un jumeau numérique de cette usine a été conçu, et nous développons des interactions simulant celles effectuées dans la réalité. L’ensemble des gestes, des actions, et des déplacements de l’opérateur dans le jumeau numérique sont rendus possibles par l’utilisation d’un casque de réalité virtuelle ou de dispositifs immersifs tel que des équipements de type « CAVE » ou des écrans 3d stéréoscopiques.
Un processus itératif
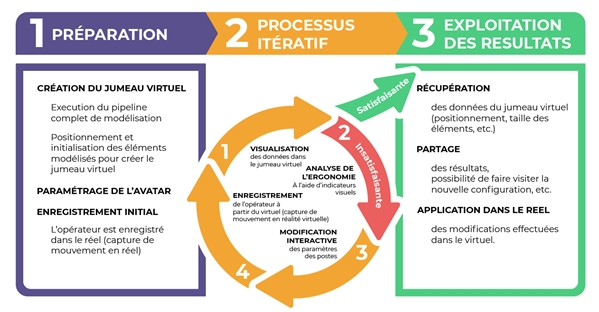
La première phase a pour vocation de préparer les données graphiques et recréer tous les acteurs qui se retrouveront dans le monde virtuel. Elle nécessite donc la création d’un jumeau virtuel de l’usine réelle, ainsi qu’un avatar de l’opérateur aux proportions exactes et enfin la capture des mouvements de l’opérateur réalisant son travail.
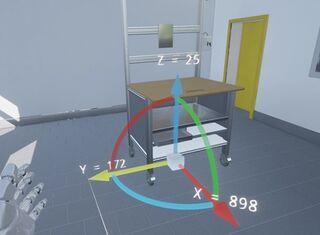
La seconde phase se déroule dans l’univers virtuel. Un ergonome est invité à observer, commenter et critiquer les données issues d’une capture de mouvement et qui sont appliquées à l’avatar de l’opérateur dans le jumeau virtuel de l’usine. Des indicateurs graphiques suivant les recommandations admises sont ajoutés à la scène pour l’aider dans cette tâche. L’ergonome peut également agir et modifier interactivement le placement de certains éléments constitutifs du poste de travail afin de les rendre plus adaptés à la nature de la tâche accomplie par l’opérateur. L’opérateur peut participer à cette seconde phase en testant ces modifications dans le même environnement virtuel et en collaboration avec l’ergonome. Un processus itératif s’engage alors, l’ergonome pouvant observer l’effet de ces modifications sur les gestes et postures de l’opérateur en action, et modifier à nouveau, autant de fois que nécessaire la disposition des éléments du poste de travail jusqu’à obtenir un résultat satisfaisant.
La troisième et dernière phase débute avec la récupération du jumeau virtuel intégrant les modifications validées par l’ergonome. Cette configuration virtuelle améliorée peut être revisitée, discutée et approuvée pour finalement être appliquée sous la forme de modifications réelles dans l’usine.

Numérisation des gestes...

...sur l'ancienne...

...Et la nouvelle ligne.
La numérisation des gestes
L'analyse des gestes est aujourd'hui facilitée par les outils de capture et numérisation des gestes de type combinaison de données. Pour le travailleur virtuel et l’étude de l’ergonomie de son poste de travail, nous avons fait l’acquisition d’une combinaison Perception Neuron de Noitom, qui permet une capture de mouvements sans fil grâce à des modules inertiels adaptables. Cette combinaison nous permet de réaliser la numérisation des gestes d'un opérateur sur un poste réel. Les captures de mouvement nécessite d’équiper l’opérateur avec la combinaison, ne phase de calibration de la combinaison est ensuite nécessaire, faisant suite à une configuration du profil morphologique de l’opérateur dans l’outil “Axis Neuron” (le logiciel de gestion et de configuration des combinaisons de Perception Neuron.
La restitution des gestes
Les gestes de l'opérateur doivent être restitués dans le contexte de leur poste de travail, il peut être restitué en temps réel. Il est possible de restituer les gestes de plusieurs opérateurs en réalisant des numérisations de manière séquentielle. Le modèle 3D de la ligne ou du poste peut être repris d'un modèle de CAO est adapté au possibilités de restitution en temps réel de la réalité virtuelle. Si le modèle numérique n'est pas disponible, les modèles 3D des postes devront être modélisés, possiblement de manière simplifiée, ou numérisés par photogrammétrie ou à l'aide d'un scanner 3D. Dans nos expérimentations à l'usine école de l'IUT de Haguenau, nos avons expérimenté les deux situations

L'ancienne ligne de l'IUT de Haguenau

Avatars animés sur la nouvelle ligne Bosch de l'IUT de Haguenau
La calibration de la combinaison de données nous permet d'obtenir certaines caractéristiques morphologiques de l'opérateur. Nous avons développé un module de configuration d'avatars qui permet de préciser ces caractéristiques pour que la restitution soit la plus réaliste possible.
Ergonomie des gestes et cotation des postes de travail
Dans Ergonom.io, nos objectifs sont d’améliorer l’ergonomie du poste de travail et l'ergonomie des gestes de l’opérateur, ainsi que la productivité de la ligne de production. La réalité virtuelle permet la mise en œuvre de solutions innovantes et prometteuses pour accomplir ces objectifs. Notre démarche se décompose en trois grandes étapes :
- Capturer les gestes réels de l'opérateur, et les restituer en virtuel pour analyse,
- Étudier, analyser et optimiser l'ergonomie d’un poste de travail en effectuant le travail d'un opérateur en réalité virtuelle,
- S'appuyer sur les connaissances obtenues en virtuel pour améliorer la configuration des postes réels.
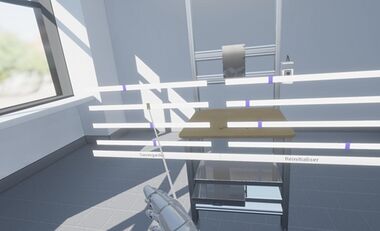
La qualification des gestes prend la forme d’indicateurs visuels graphiques, localisés, suivant les recommandations des normes les plus courantes (RULA, NERPA, EAWS...).
Restitution visuelle de la qualité des gestes
Cotation des postes de travail
Du réel au virtuel, du virtuel au réel
Un des objectifs d’Ergonom.io est de permettre un travail collaboratif, en temps réel ou non. Nous proposons ainsi deux modes de fonctionnement :
- L’ergonome et l’opérateur ne peuvent travailler en même temps. Dans ce cas, la capture de l’opérateur est effectuée à partir de la scène configurée par l’ergonome. La capture est alors rejouée plus tard dans l’environnement virtuel pour une visualisation et de nouvelles corrections par l’ergonome.
- L’ergonome et l’opérateur peuvent travailler en même temps. Le processus itératif d’amélioration de la configuration du jumeau virtuel est alors direct car l’ergonome peut modifier les paramètres en temps réel, alors même que l’opérateur est en train d’effectuer ses tâches dans le virtuel.
Le nouvel enregistrement permet donc à l’ergonome d’avoir une visualisation des scores et des postures à risque de l’opérateur, et c’est donc ce cycle complet qui permet de manière itérative (en temps réel ou non) l’amélioration de l’ensemble des paramètres ajustables du jumeau virtuel.
L'intérêt de la réalité virtuelle est que tout ce qui est réalisé dans le réel peut être reproduit dans le virtuel. L'interaction dans le virtuel fait appel à des comportements contextuels par exemple si on ne simule les gestes qu'avec un casque de réalité virtuelle et ses contrôleurs.
Interaction contextualisée
La main prend une forme liée à l'objet saisi
La mise en place des postes de travail et leur modification en réalité virtuelle. Modification de l’ergonomie des postes pour rester dans les valeurs d’angle de confort pour chaque partie du corps (adaptation en virtuel à la morphologie de l’opérateur).